Zintegrowany System Batymetryczny
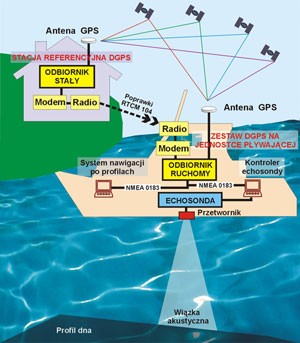
W Katedrze Geodezji Satelitarnej i Nawigacji Uniwersytetu Warmińsko-Mazurskiego w Olsztynie opracowano i wdrożono technologię zintegrowanych pomiarów batymetrycznych, umożliwiającą nawigację jednostki pływającej po wcześniej zaprojektowanych profilach, badania kształtu dna zbiornika, zbieranie danych do obliczeń objętości mas wodnych oraz tworzenie map batymetrycznych naturalnych i sztucznych śródlądowych zbiorników wodnych. Podstawowe elementu systemu pomiarowego to: satelitarny system pozycjonowania jednostki hydrograficznej DGPS/RTK, wykorzystujący radiomodemy/teletransmisję danych GPRS lub system EGNOS do przesyłania poprawek DGPS/RTK, cyfrowa sonda ultradźwiękowa, oraz specjalistyczna jednostka pływająca do prac hydrograficznych i inżynierii wodnej.
Zintegrowany System Batymetryczny
Nowoczesny system satelitarnego pozycjonowania DGPS/RTK składa się z dwóch odbiorników geodezyjnych. Jeden z nich (Stacja Bazowa) to aktywna stacja referencyjna, która transmituje w sposób ciągły, w interwale 1 sekundowym, ogólnie dostępne depesze radiowe pozwalające na pracę metodą DGPS oraz umożliwiające precyzyjne pozycjonowanie fazowe RTK/OTF. Drugi, ruchomy odbiornik określa pozycję anteny i poprawia ją wykorzystując odebrane ze stacji pakiety danych. Do transmisji danych ze stacji referencyjnej do odbiornika ruchomego wykorzystuje się zestaw dwóch radiomodemów lub terminale GPRS (General Packet Radio Services), przeznaczone do pakietowej transmisji danych.
Technika DGPS pozwala uzyskać współrzędne jednostki pływającej w czasie rzeczywistym z dokładnością do 0,5 metra. Wykorzystując pozycjonowanie fazowe RTK/OTF przy zastosowaniu wysokiej klasy odbiorników i algorytmów obliczeniowych można osiągnąć dokładności rzędu 1-2 cm dla współrzędnych poziomych B i L oraz 1-5 cm dla współrzędnej wysokościowej h. Tak wysokie dokładności pozycjonowania w czasie rzeczywistym otwierają możliwości zbierania dużej ilości cennych danych pomiarowych dla tworzenia systemów informacji terenowej i topograficznych baz danych.
Kolejnym elementem Zintegrowanego Systemu Batymetrycznego jest cyfrowa sonda ultradźwiękowa. To wysokiej klasy urządzenie wykorzystuje fale dźwiękowe do określania głębokości zbiorników wodnych. W pomiarach hydrograficznych wykorzystywane są następujące systemy pomiarowe: eschosonda jednowiązkowa, echosodna wielokanałowa, sonda wielowiązkowa oraz sonar boczny.
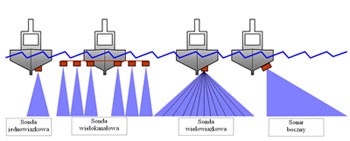
Różne systemy wykorzystywane w pomiarach hydrograficznych
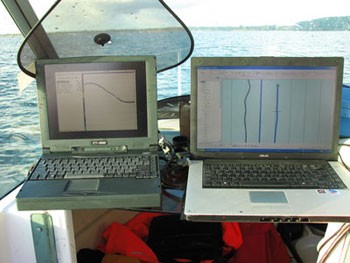
Nasz zespół dysponuje echosondą Simrad EA 501P o częstotliwości 200 kHz. EA 501 P to echosonda cyfrowa, sterowana i kontrolowana przez komputer polowy. Dane z detekcji dna oraz echogramy są zapisywane w czasie pomiaru na twardym dysku laptopa. Dane pomiarowe mogą być odtwarzane w warunkach biurowych przy innych ustawieniach parametrów echosondy. Pozwala to wielokrotnie prześledzić oraz przeanalizować echogramy z ciekawych miejsc pomiaru. Dane z sondażu hydroakustycznego wraz z odebraną pozycją z satelitarnego systemu pozycjonowania mogą być wyeksportowane do pliku .txt i poddane dalszemu opracowaniu.

Sonda ultradźwiękowa Simrad EA 501P
Antena odbiornika GPS i przetwornik echosondy zostały tak zamocowane na łodzi, aby leżały w jednej linii pionowej
Zatem wyznaczana w trakcie pomiarów batymetrycznych pozycja anteny odbiornika GPS jest pozycją horyzontalną przetwornika echosondy w tej samej jednostce czasu.
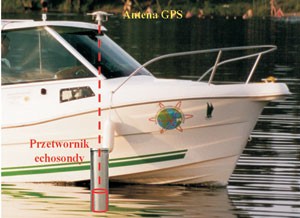
Sposób umieszczenia anteny GPS i przetwornika echosondy
Sprzęt pomiarowy na jednostce pływającej
Sonda EA 501P transmituje tylko jedną wąską wiązkę fal dźwiękowych (7ox7o), co umożliwia precyzyjne określenie odległości od przetwornika do dna zbiornika
Częstotliwość pomiaru do 10 impulsów na sekundę,
Zasięg pomiaru około 600m w zbiornikach słodkowodnych
Minimalna głębokość: 0,3m dla 200kHz
Dokładność wynosi 0,25% zakresu pomiarowego (po uwzględnieniu profilu prędkości dźwięku w wodzie)
Waga 7kg,
Długość 34cm,
Szerokość 35cm,
Wysokość 14cm,
Gromadzenie danych – dane wykonane w czasie pomiarów zapisywane są w plikach o rozszerzeniu *.dg8, gdzie 8 oznacza 2008 rok wykonywania pomiaru.
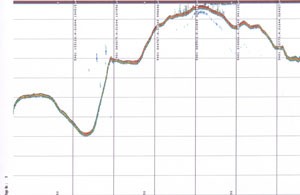
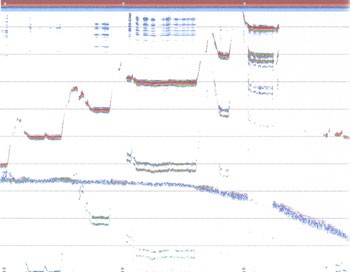
Echogram prezentujący wybrany profil dna Jeziora Kamienne
Nasz zespół dysponuje także dwuczęstotliwościową echosondą hydrograficzną RESON NaviSound 515 200/33 kHz.

Echosonda Reson NS515
Wykorzystując niską i wysoką częstotliwość możemy zbierać dodatkowe informacje o strukturze dna zbironika wodnego.
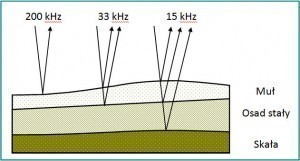
Odbicie dźwięków o różnych częstotliwościach od osadów dna zbiornika wodnego
Pracując echosondą dwuczęstotliwościową możemy w czasie rzeczywistym monitorować obraz dna miękkiego (pierwsze odbicie np. 200kHz) i obraz dna twardego (33kHz).
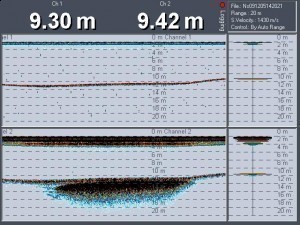
Echogram z jeziora Kisajno (2009)
Uruchomienie i kalibracja zintegrowanego systemu batymetrycznego
Aby osiągnąć wysoką dokładność pomiaru głębokości za pomocą jednoczęstotliwościowej sondy ultradźwiękowej niezbędne jest przeprowadzenie kalibracji systemu pomiarowego. Pomiary hydrograficzne prowadzone są na różnych zbiornikach wodnych w czasie różnych warunków atmosferycznych. Rozkład pionowy temperatury wody może być inny w poszczególnych częściach akwenu, oraz może być zmienny w czasie. Dlatego też przed rozpoczęciem pomiarów batymetrycznych, oraz w ich trakcie, należy zbadać rozkład prędkości propagacji fal dźwiękowych w wodzie, w zależności od głębokości. Na stosunkowo płytkich wodach o stałej temperaturze, można uśrednić pomierzoną prędkość dźwięku z różnych głębokości, i po wprowadzeniu do systemu pomiarowego przystąpić do prac sondażowych. Jeśli mamy do czynienia z głębokim zbiornikiem wodnym o zdecydowanie zróżnicowanej temperaturze wody na różnych głębokościach, należy pomierzyć pionowy rozkład prędkości fal akustycznych i policzyć poprawki korekcyjne dla poszczególnych głębokości. Pionowy rozkład prędkości fal ultradźwiękowych w wodzie można pomierzyć przy pomocy sondy kalibracyjnej lub za pomocą tzw. płyty kalibracyjnej (deski kalibracyjnej).
W pierwszym dniu pomiaru, przed rozpoczęciem sondażu wykonuje się badania parametrów wody w celu ustalenia prędkości rozchodzenia się dźwięku w wodzie. Prędkość dźwięku w wodzie ma zasadniczy wpływ na dokładność pomiaru głębokości metodami hydroakustycznymi. Prędkość dźwięku jest parametrem, którego znajomość jest istotna do kalibracji oraz prawidłowej pracy hydroakustycznych urządzeń pomiarowych, takich jak echosondy czy sonary. Wartości temperatury, zasolenia i ciśnienia wody w danym miejscu zależą głównie od głębokości. Pionowy rozkład prędkości dźwięku zależy przede wszystkim od termicznej struktury wody, a mniej od zasolenia. Obniżanie się temperatury wraz z głębokością powoduje spadek prędkości dźwięku, ale jednocześnie ze wzrostem głębokości wzrasta ciśnienie hydrostatyczne powodujące zwiększenie prędkości dźwięku.
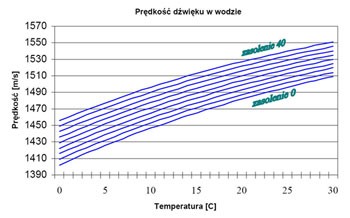
Zależność prędkości dźwięku w wodzie od temperatury i zasolenia
Impulsy akustyczne nie rozchodzą się prostoliniowo w wodzie. Odchylanie promienia wiązki akustycznej od linii prostej, spowodowane zmianą prędkości w poszczególnych warstwach głębokości, nazywa się refrakcją. Refrakcja stanowi przyczynę powstawania martwych stref, kanałów dźwiękowych i rozpraszania impulsów akustycznych w wodzie, powodując pewne błędy w technikach pomiarowych wykorzystujących ultradźwięki. Zmienność prędkości dźwięku w wodzie jest relatywnie mała. Oscyluje ona między 1400 m/s a 1580 m/s, w zależności od panujących warunków hydrologicznych. Prędkość dźwięku może być mierzona bezpośrednio, za pomocą specjalnych mierników SVP (Sound Velocity Profiler), lub obliczana na podstawie wzorów empirycznych z wielkosci otrzymywanych z sond CTD (conductivity, temperature, depth). Błąd pomiaru mierników prędkości dźwięku (SVP) wynosi ok. 0.1 m/s, a dokładność obliczeń przy znanych wszystkich pomiarach jest w przybliżeniu podobna. Istnieje wiele wzorów empirycznych służących do obliczania prędkości dźwięku w wodzie. Najbardziej znane wzory to: Wooda, Wilsona, Medwina, Chena i Millero czy Del Grosso. Różnią się one przyjętymi współczynnikami, a wyniki obliczeń nie odbiegają daleko od siebie.
Przed sondażem hydroakustycznym wykorzystujemy urządzenie do badania przewodności oraz temperatury YSII 600R oraz program YSI2SS do obliczeń prędkości dźwięku w wodzie na podstawie formuły opracowanej przez Medwiena w 1977 r. Opiera się ona na znajomości temperatury, zasolenia i głębokości, mających zasadniczy wpływ na prędkość rozchodzenia się fali dźwiękowej w wodzie.

Sonda CTD YSI 600R
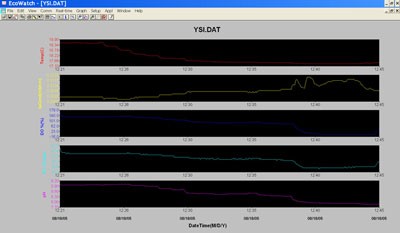
Badanie parametrów wody
Na podstawie wyników badań prędkości dźwięku w wodzie oraz bezpośredniego pomiaru sondą łańcuszkowo – talerzykową kalibruje się jednowiązkową sondę ultradźwiękową Simrad EA 501P do pomiaru głębokości zbiorników śródlądowych. W trakcie prowadzenia dotychczasowych pomiarów na polskich wodach śródlądowych prędkości dźwięku w wodzie wynosiły średnio od 1425 do 1480 m/s (w zależności od temperatury wody).
Po kalibracji echosondy należy wykonać kontrolny pomiar odległości do talerza sondy łańcuszkowej z ustaloną prędkością dźwięku.
Kontrola kalibracji echosondy Simrad EA 501P
Po właściwym przeprowadzeniu aparatury hydrograficznej i nawigacyjnej można przystąpić do sondażu hydrograficznego.

Dwie jednostki pływające i dwa zestawy pomiarowe gotowe do sondażu hydroakustycznego (jezioro Kisajno 2010)